بالگرد نبوغ چهاردهمین پرواز در مریخ را نیمهتمام گذاشت

به نظر میرسد بالگرد کوچک نبوغ پس از چند ماه در مریخ بودن و تلاشهای پیوسته برای پرواز و حتی شکستن رکوردهای خودش، بیش از همیشه خسته شده و به همین دلیل هم عملیات چهاردهمین پرواز خود را پیش از برخاستن لغو کرد.
بالگرد «نبوغ» (Ingenuity) قرار بود چهاردهمین پرواز خود در سیارهی سرخ را 18 سپتامبر (27 شهریور) انجام دهد و با رفتن به ارتفاعی نسبتا کم، توانایی خود را در پرواز با سرعت بالاتر پرهها تا 2700 دور در دقیقه به جای 2537 دور در دقیقه نشان دهد.
به گفتهی «جاکو کاراس» (Jaakko Karras) معاون عملیات نبوغ در آزمایشگاه پیشرانش جت (JPL) ناسا، تیم مأموریت به این دلیل چنین تنظیمی را برای بالگرد در نظر گرفته است که با تغییر فصلها در مریخ، چگالی جو این سیاره در دهانهی جزرو هم کاهش مییابد و پرواز سختتر خواهد شد.
بهمنظور آماده شدن برای چهاردهمین پرواز، نبوغ 15 سپتامبر (24 شهریور) بدون برخاستن از سطح مریخ، یک آزمایش چرخش پرهها را با رساندن سرعت آنها به 2800 دور در دقیقه انجام داد. همه چیز خوب پیش رفت تا نبوغ برای پرواز 27 شهریور آماده باشد اما طبق چیزی که ناسا امروز اعلام کرد، این ربات پرنده هنگام عملیات اصلی موفق نبوده است.
کاراس گفت: «آنچه اتفاق افتاد این بود که نبوغ هنگام بررسی خودکار پیش از پرواز، یک ناهنجاری را در دو سروو موتور کنترلکنندهی پرواز تشخیص داد و دقیقا کاری را کرد که باید انجام میداد؛ پرواز را لغو کرد.»
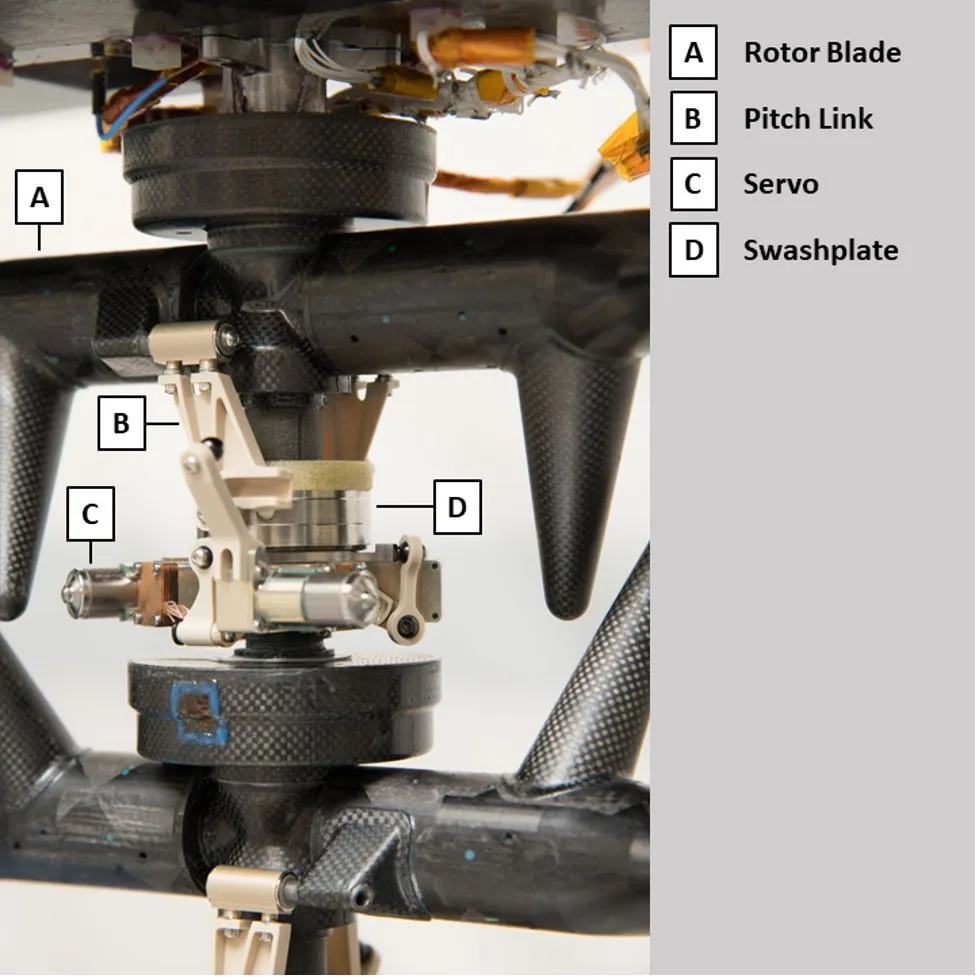
نمایی نزدیک از سواشپلیت بالایی بالگرد نبوغ و محل قرارگیری سروو موتورها
Credit: NASA/JPL-Caltech
پیش از این هم یک ناهنجاری در سیستم ناوبری نبوغ باعث ایجاد لحظاتی دلهرهآور در پرواز ششم شده بود. بالگرد نبوغ 6 سروو موتور دارد که به هر دو روتور سه عدد اختصاص دارد. این موتورهای کوچک، زاویهی گام پرهها را تنظیم میکنند که به بالگرد امکان میدهد تا جهت و موقعیت خود را در طول پرواز کنترل کند.
معاون عملیات نبوغ افزود: «سرووموتورها بسیار کوچکتر از موتورهایی هستند که پرهها را میچرخانند اما کار فوقالعادهای انجام میدهند و برای پرواز کنترلشده بسیار اهمیت دارند.»
تجزیهوتحلیل بررسی خودکار پیش از پرواز 27 مهر نشان داد که دو سروو موتور بالگرد نبوغ هنگام آزمایش کمی نوسان داشتهاند. تیم مأموریت هنوز در تلاش برای تعیین علت این موضوع است اما ممکن است به دلیل افزایش ساییدگی گیربکسهای سروو موتورها و اتصالات آنها در مدت زمان طولانی حضور در مریخ باشد.
نبوغ دو آزمایش دیگر سروو موتورها را هم در 21 و 23 سپتامبر (30 شهریور و 1 مهر) پشت سر گذاشت اما به گفتهی کاراس در این آزمایشها ناهنجاری مثل قبل دیده نشد. او افزود: «ما چند ابزار برای رفع این ناهنجاری در اختیار داریم و خوشبین هستیم که بتوانیم از آن عبور کنیم و بهزودی دوباره به پرواز بازگردیم.»
حتی با وجود رفع ناهنجاری، مکانیک مداری مریخ باعث یک تأخیر دیگر در پرواز حداقل تا چند هفتهی آینده میشود. مریخ هماکنون در سمت مقابل خورشید نسبت به زمین قرار دارد و این باعث میشود تا خورشید ارتباط میان دو سیاره را مختل کند. بنابراین ناسا فرستادن دستور به بالگرد نبوغ، مریخنورد پشتکار و دیگر رباتهای مستقر در مریخ را تا اواسط اکتبر (اواخر مهر) متوقف خواهد کرد.
کاراس گفت: «نبوغ در این مدت کاملا بدون استفاده نخواهد بود. بالگرد همراه با مریخنورد به گونهای برنامهریزی میشوند که هفتهای یک بار با هم ارتباط برقرار کنند و نبوغ اطلاعات اولیهی سلامت سیستم خود را به پشتکار ارسال کند. پس از پایان دورهی قطع ارتباط، ما این دادهها را روی زمین دریافت میکنیم و متوجه میشویم که نبوغ در یک دورهی نسبتا طولانی فعالیت نداشتن در مریخ چگونه عمل میکند.»
عکس کاور: طرحی گرافیکی از بالگرد نبوغ در سطح مریخ
Credit: NASA/JPL-Caltech
منبع: Space

